IT之家 3 月 18 日消息,在机器人领域,我们经常看到机器人使用机械手抓取和操作物体。然而,这种方法并不能完全体现人类与世界的互动方式,尤其是当面对笨重物品时。
由丰田公司打造的普尼奥软机器人(Punyo soft robot)则另辟蹊径,不同于传统机器人,普尼奥从我们人类的行为中汲取灵感,不仅使用双手,还会调动胸部、臀部和手臂来搬运物体,就像我们人类一样。

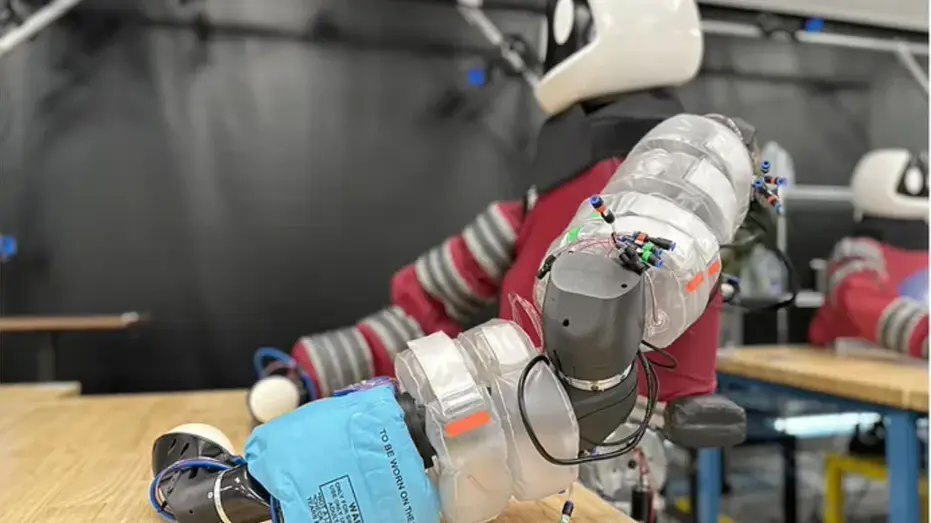
IT之家注意到,普尼奥拥有可爱的面孔,让人联想到迪士尼动画《超能陆战队》中的大白。不仅如此,普尼奥看起来像穿着一件舒适的毛衣,这并非单纯为了好看,而是为了实现一个重要功能 —— 拥抱。
这款毛衣状的覆盖物由抓握材料制成,在坚硬的金属骨架上提供了一个柔软的缓冲层。织物中嵌入的触觉传感器可以让普尼奥精确地感知它所拥抱的东西,无论是人还是物体。
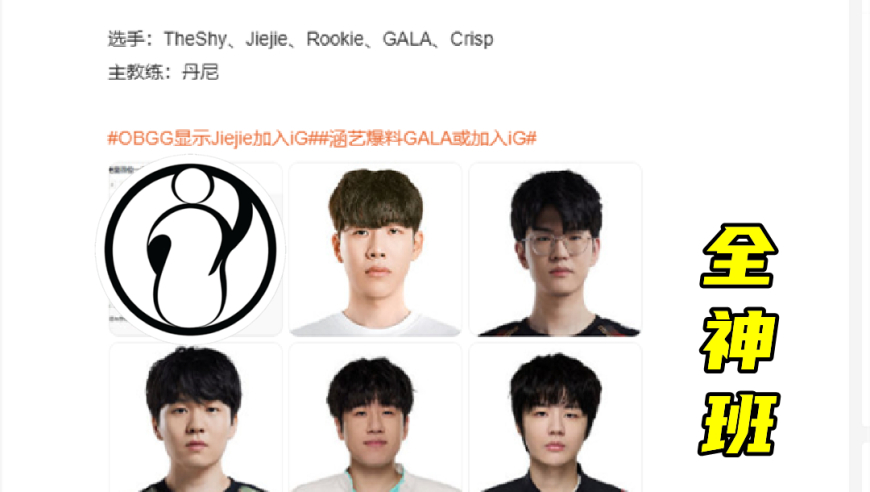
普尼奥没有传统的手,取而代之的是丰田称之为“爪子”的东西。这些“爪子”更像是充气蹄子,内侧印有小点。当爪子触摸到物体时,小点会变形,从而揭示接触的形状和力度。通过摄像头捕捉到这种变形后,将信息直接反馈给机器人的“大脑”,帮助其有效抓取物体。

普尼奥的胳膊由一系列充满空气的气囊、气管和压力传感器组成,从肩膀延伸到手腕。这些气囊可以单独调节压力,根据手头任务实现最佳的刚度。

丰田研究院的机器人科学家通过远程操作训练普尼奥处理各种大型物体,它的一些技能包括:
倾斜和抬起:普尼奥向前倾斜,将物品抱到胸前,然后向后倾斜抬起它们。
堆积物品:普尼奥甚至能够堆积物品,使其适应不同的场景。
肩扛物体:把大桶水放到普尼奥的肩膀上,会稳稳地固定住。
总结来看,普尼奥是一个非常先进的机器人,它可以模仿人类的动作,而且具有更高的灵活性和自主性。它的“爪子”设计是基于人体运动学原理,使普尼奥能够在硬表面上抓取物品。同时,普尼奥还可以用来搬运更大的物品,或者在需要的时候自我站立。
然而,尽管普尼奥有很多优点,但在实际应用中还存在一些挑战。例如,对于某些复杂的工作环境,普尼奥可能无法完全取代人工。此外,随着科技的发展,未来的机器人可能会更加智能化和个性化,而普尼奥还需要不断地进行升级和发展。
因此,我们需要进一步研究和探索如何将人工智能技术应用于机器人领域,以提高其性能和效率。同时,我们也应该关注未来可能出现的新技术,以便普尼奥和其他机器人可以在更多方面发挥重要作用。总的来说,普尼奥的成功为我们展示了科技进步带来的无限可能性,我们期待在未来能看到更多的创新和突破。