如果仔细观察,我们会发现自然界中许多的生物体都具备变形能力。一些大大小小的生物体都会改变它们的形状,以便在复杂的自然环境中有效生存和繁衍。
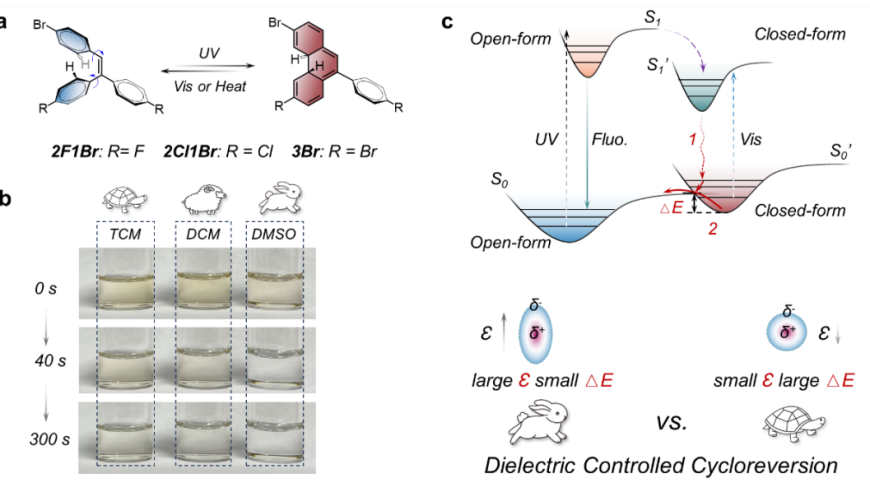
例如,犰狳为保护免受危险会将身体卷成球状,而褶伞蜥则展开伞状项圈膜以示威胁和交配。在微观层面上,像变形虫这类的单细胞生物会伸出伪足来运动和进食,而涡虫则可以在几毫秒内收缩其痉挛体。
这种形状转换是由软质和刚性结构的复杂相互作用网络产生的,它的特点是具有极佳的适应性、灵活性、顺应性、能源效率和安全性。
从大自然的解决方案中汲取灵感可创造能够变形的人工系统,其潜在应用涵盖机器人、可穿戴设备、材料科学和生物工程等多个领域。
基于已有文献,目前尚没有利用声学方法驱动超快微型机器变形的研究。近期,来自瑞士苏黎世联邦理工学院的博士生张志远及其所在团队实现了利用声场的强大驱动力来设计可变性微型机器。
近日,相关论文以《声学变形器:可变形的声激活无线微型机器》(SonoTransformers: Transformable acoustically activated wireless microscale machines)为题发表于 PNAS [1]。
张志远为论文第一,浙江大学博士生施展为论文第二,苏黎世联邦理工学院助理教授丹尼尔·艾哈迈德(Daniel Ahmed)担任通讯。
 图丨相关论文(来源:PNAS)
图丨相关论文(来源:PNAS)

声波和可变形材料结合,一种全新的声学变形器
人工系统中的形状变换是通过多种驱动方法实现的,例如机械推动、加压流体、形状记忆聚合物和合金、介电和液晶弹性体。研究人员还利用一系列外部刺激和场,包括化学梯度、光、热、湿度、电场和磁场来驱动小型不受束缚的机器。
然而,大多数现有可变形机器受限于厘米尺寸或毫米尺寸的结构,这阻碍了它们在小型化微型机器中的使用。这些开创性的研究也表现出一定的局限性。例如,大多数驱动方法通常很慢(1 至 150s),导致变形速度较低。
虽然电磁致动可以被认为是瞬时的,但需要复杂的预编程来生产与这些方法兼容的微机器,例如预先设计的磁矩、多层结构和多步骤加工过程。更为重要的是,当规模缩小时,控制其运行的底层物理机制可能会受到显著影响或变得无效。
当材料和结构缩小到微米尺度时,它们通常表现出与尺寸相关的特性,导致在形状转变过程中难以预测和控制的机械变化。
此外,诸如范德华力和静电力之类的表面力在微观尺度上占主导地位,导致微小结构之间的静摩擦力和粘附力增加,这使得它们更容易断裂且更难以变形。
声学为可变形微型机器提供了一条有前景的发展途径,因为它们能够实现微米和纳米尺度的小型化、简化设计和快速原型制作、远程和无线操作以及毫秒级的超快和可逆变形。
张志远说:“这项研究提出了声波和可变形材料的全新概念,这一新颖的想法将促进材料科学、软物质、智能超材料、机器人、柔性电子、自适应光学、微医学、微工程等诸多领域产生新概念、新想法和新应用。”
 图丨一种可变形的声学微机器(来源:PNAS)
图丨一种可变形的声学微机器(来源:PNAS)
该课题组所设计的声学微机器被命名为“SonoTransformers”,意为一种声学激活的可变形微型机器,它使用具有不同刚度的预编程软铰链提供形状变形能力。
当暴露在声场中时,这些软铰链通过强化振动来集中声能,并在几毫秒内为整个微型机器的变形提供必要的力和扭矩。研究人员创建了新型机器设计来预先确定折叠状态,从而实现声学变形的精确编程和定制。
此外,该研究还展示了通过调整声场功率,有选择性地驱动可变形微型机器人,最终实现高度控制和多样性功能。
审稿人评价称,这项研究首次提出了由声学可变微型机器的概念,这种声学激活机制为研究微型机器和微型机器人提供了一个多功能的平台。

可控的微形变,探索声学与软物质相互作用的平台
那么,这种声学微机器是怎样制造出来的呢?
张志远表示,他们使用定制的紫外线光聚合技术制造了声学可变形微机器的原型。当紫外光穿过光掩模时,微机器的设计图案被投射到水凝胶混合物中,导致水凝胶混合物聚合。这种方法在 3 分钟内可生产出单批多达 500 个微机器。
为了在微机器中实现不同的刚度和厚度,他们设计了带有空白和栅格元素的光掩模。这种设计可以改变混合物的局部曝光强度,空白元素会导致水凝胶完全聚合,产生相对较硬的区域;而栅格元素则实现部分聚合,产生相对较软的区域。
接下来的关键一步,是要实现可控的变形。这种微型机器能够在声场中变形的关键因素在于,它的声学可变形微梁部件中的软铰链和刚性连接具有不同的刚度。
通过高速显微镜,可以观察声场中可变形微梁的动力学。张志远在观察中发现了一种有趣的现象:当微梁两端被夹紧并受到声场作用时,软铰链部分表现出更大幅度的周期性振荡,这表明声场集中在软铰链区域。
通过一系列软铰链长度、宽度和曝光时间的表征实验,研究人员发现较薄、较长且较软的软铰链导致微机器的刚性相对较低。因此,软铰链容易可以产生更大的声力,导致更明显的折叠。软铰链声学激活的可编程性和选择性为可变形微型机器和微型机器人的设计提供了更多可能性。
为控制微型机器的变形,张志远设计了各种类型的声学可变形微梁,比如具有直的、弯曲的和楔形软铰链的微梁。
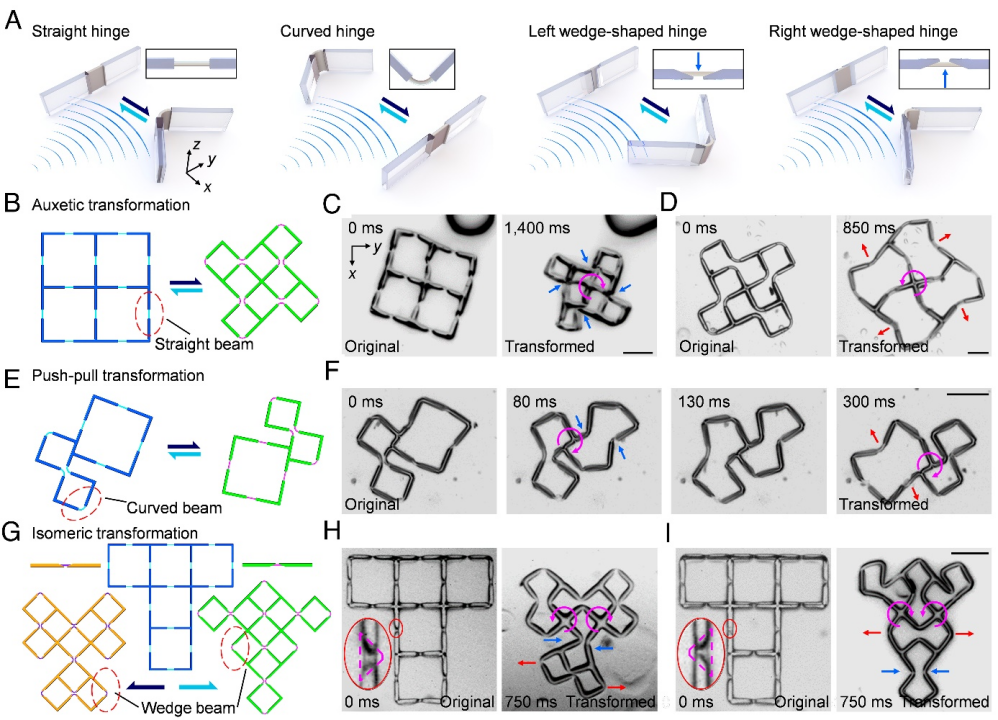 图丨各种软微机器展示了多功能的形状变换(来源:PNAS)
图丨各种软微机器展示了多功能的形状变换(来源:PNAS)
在声学驱动时,包含这些不同软铰链的微型机器表现出不同的行为。具体来说,由直的微梁构成的四宫格微型机器在声激活时收缩;相反,由弯曲微梁组成的微机器在受到声刺激时会展开;包含直的和弯曲微梁的微机器会同时折叠和展开。不同微梁的组合使用允许声学可变形微机器的多样化设计。
“通过有效地设计微型机器,可以使其表现出可预测和有针对性的变形行为。”张志远说。
基于可变形的声学微梁,该团队开发了一个四足微型机器人,该机器人的四个方形腿使用了不同长度的软铰链。通过调节声激励电压,该机器人的方形腿,能够选择性地变形。
对于低于 30VPP 的激励电压 ,微型机器人保持其原始形状。在 40VPP 下 ,具有最长铰链的腿会折叠。当电压进一步增加到 45VPP 时 ,腿 2 折叠,而腿 1 仍然保持折叠。最后,当电压达到大约 50VPP 时,腿 3 与折叠的腿 1 和 2 一起折叠。
这种可调性能够实现可寻址和可编程的形状变换,突显了使用声学可变形微梁开发复杂和多功能微型机器人的潜力。
目前,声学激活的可变形微型机器只具备平面内 2D 变形能力。通过引入更加复杂的结构设计和更强大的声场激励,声学可变形微型机器将具备实现三维空间内的扭转和折叠的能力。
多功能声学可变形微梁和可变形微型机器的发展为多个科学领域的进步铺平了道路。从物理学的角度来看,它提供了一个新的机会来探索声学与软物质的相互作用,例如振动模式和同步效应等。
在超材料领域,结合声学可变形微梁的设计,有助于复杂的 3D 形状变形和 2D 到 3D 折纸/剪纸微结构的创建。这些结构可用于光学引导、声学引导和能量放大等。
在机器人技术中,声学可变形梁开辟了新颖的微尺度设计范式,并且可以通过实现转向、推进和环境适应等功能来增强可操作性。
对于医学领域而言,由于声场可以轻松延伸到体内,这些微型机器有望在不久的将来动态地穿过复杂的血管。
 图丨张志远与蒙德里安作品(来源:张志远)
图丨张志远与蒙德里安作品(来源:张志远)
总的来说,该研究提出了一种全新的声学驱动的软体机器人设计范式,即利用不同刚度的软铰链网络实现软机器人的变形、运动和其他功能。声学驱动的软体机器人是一个全新但快速发展的领域,研究团队将基于软铰链设计更多的新型软体机器人。
参考资料:
1.Zhang,Z. et al. SonoTransformers: Transformable acoustically activated wireless microscale machines. PNAS (2024). https://www.pnas.org/doi/10.1073/pnas.2314661121
运营/排版:何晨龙
结论:
这篇论文主要讨论了自然界中许多生物体都能具备变形能力的原因。例如,有的生物体将身体卷成球状,另一些生物体展开了伞状项圈膜以示威胁和交配。虽然现有的可变形机器受限于厘米和毫米尺寸的结构,但他们展示出了一定水平的变形能力和简化设计。最近,一项发表在《声学变形器:可变形的声激活无线微型机器》上的研究表明,这些创新的想法可以帮助我们实现轻量化、可操控的微形机器人。这个理论的应用领域包括机器人、可穿戴设备、材料科学和生物工程等领域。未来的研究可能会探讨如何结合声学和软物质来制造这种全新的微机械。